Tohid Kargar Tasooji
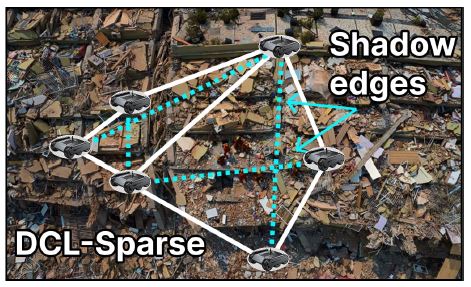
I am currently a Postdoctoral Research Fellow at the Heterogeneous Robotics (HeRo) Research Lab, working with Prof. Ramviyas Parasuraman. I am developing advanced algorithms for multi-robot systems, focusing on resilient cooperative localization, communication-aware coverage, and learning-enabled control strategies for autonomous navigation in dynamic and adversarial environments. My work integrates event-triggered control, model predictive frameworks, and hierarchical decision-making to enhance the robustness, safety, and efficiency of heterogeneous robotic teams.
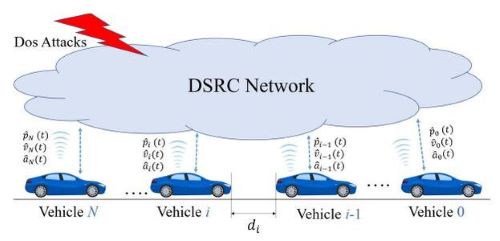
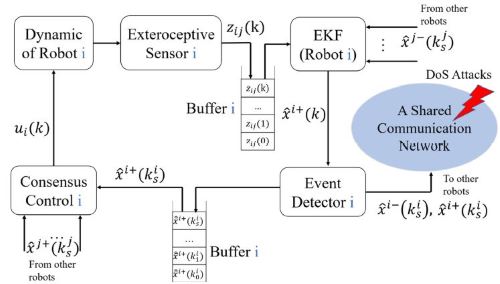
I received my PhD in Control and Robotic Engineering from the University of Alberta in 2023. During my PhD, I led efforts in the Advanced Control Systems Lab, working on event-triggered cooperative control and localization for multi-robot systems, designing resilient and secure control schemes, and developing real-time algorithms for autonomous navigation and multi-agent coordination.
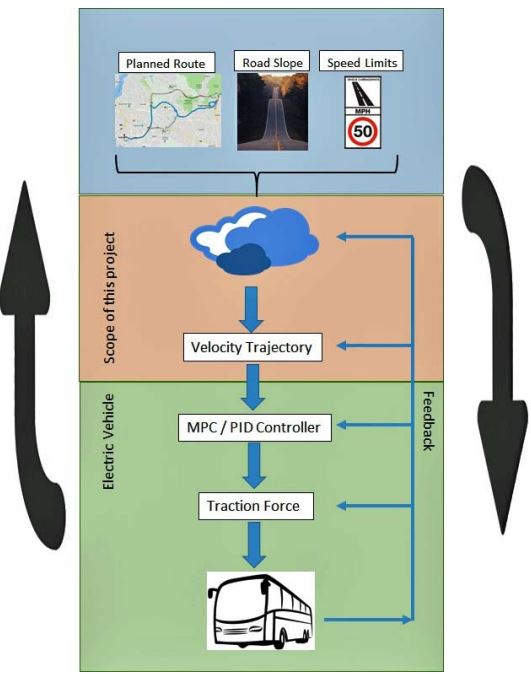
I also worked at General Motors, where I developed algorithms for vehicle dynamics, autonomous driving, and ADAS features, including route optimization, model-based control strategies, and simulation-based testing using MIL, SIL, and HIL environments.